
생체 관절 모멘트 추정을 통한 작업 유형에 구애받지 않는 외골격 제어: 연구 논문 요약
서지 정보: Collins, S. H., Eckert, A. J., & Sawicki, G. S. (2020). Task-agnostic exoskeleton control via biological joint moment estimation. Science Robotics, 5(49), eabb2223.
연구 목적: 본 연구는 다양한 인간 동작에 적응할 수 있는, 작업 유형에 구애받지 않는 외골격 컨트롤러를 개발하는 것을 목표로 합니다. 기존의 외골격 컨트롤러는 주기적이고 예측 가능한 동작에 최적화되어 있어 다양하고 구조화되지 않은 일상 활동에 적용하는 데 어려움을 겪고 있습니다.
방법: 연구팀은 딥러닝 모델을 활용하여 사용자의 하지 생체 관절 모멘트를 실시간으로 추정하는 작업 유형에 구애받지 않는 외골격 컨트롤러를 개발했습니다. 이 컨트롤러는 28가지 활동 (걷기, 달리기, 들어올리기, 런지 등)을 수행하는 동안 사용자의 엉덩이와 무릎 관절 모멘트를 추정하도록 훈련되었습니다. 컨트롤러의 성능은 작업 특이적 분류기 기반 방법과 비교하여 평가되었습니다. 또한, 10가지 활동을 수행하는 동안 사용자의 에너지 소비 (대사 비용 또는 하지 생체 관절 일) 를 측정하여 컨트롤러의 효과를 평가했습니다.
주요 결과: 딥러닝 모델은 평균 R² 값 0.83으로 엉덩이와 무릎 관절 모멘트를 정확하게 추정했습니다. 작업 유형에 구애받지 않는 컨트롤러는 작업 특이적 분류기 기반 방법보다 성능이 우수했습니다. 또한, 컨트롤러는 작업에 따라 사용자의 에너지 소비를 5.3%에서 19.7%까지 감소시켰습니다.
주요 결론: 딥러닝 기반 생체 관절 모멘트 추정을 통해 개발된 작업 유형에 구애받지 않는 외골격 컨트롤러는 다양한 활동에 걸쳐 사용자를 효과적으로 보조할 수 있습니다. 이러한 컨트롤러는 외골격의 실용성을 크게 향상시켜 다양한 분야에서의 활용 가능성을 높입니다.
의의: 본 연구는 작업 유형에 구애받지 않는 외골격 제어 분야에 중요한 기여를 했습니다. 딥러닝 기반 접근 방식은 외골격이 다양한 일상 활동에 적응할 수 있도록 하여 실제 환경에서의 활용 가능성을 높입니다.
제한 사항 및 향후 연구: 본 연구는 제한된 수의 활동과 참가자를 대상으로 수행되었습니다. 컨트롤러의 성능을 더욱 향상시키기 위해서는 다양한 활동과 사용자를 포함한 추가 연구가 필요합니다. 또한, 컨트롤러의 장기적인 내구성과 안정성을 평가하기 위한 연구도 필요합니다.
Personalizza riepilogo
Riscrivi con l'IA
Genera citazioni
Traduci origine
In un'altra lingua
Genera mappa mentale
dal contenuto originale
Visita l'originale
www.nature.com
Task-agnostic exoskeleton control via biological joint moment estimation - Nature
Approfondimenti chiave tratti da
by Dean D. Moli... alle www.nature.com 11-13-2024
https://www.nature.com/articles/s41586-024-08157-7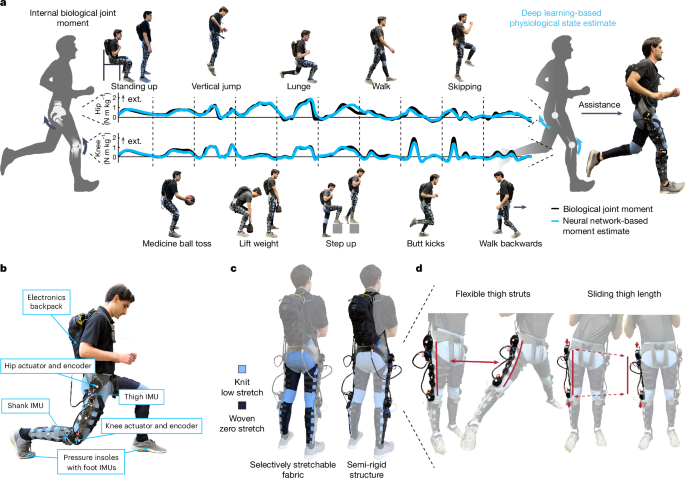
Domande più approfondite
이러한 유형의 작업 유형에 구애받지 않는 외골격 제어 시스템의 개발은 의료 재활 분야에 어떤 영향을 미칠 수 있을까요?
컨트롤러가 예상치 못한 상황이나 갑작스러운 움직임에 어떻게 반응하는지, 그리고 사용자의 안전을 어떻게 보장할 수 있는지에 대한 우려는 여전히 남아 있습니다.
인공 지능이 인간의 움직임을 배우고 향상시키는 데 사용됨에 따라, 우리는 인간 능력의 한계를 재정의하게 될까요?
© 2024 by Linnk AI