
ลงชื่อเข้าใช้
แนวคิดหลัก
研究人員開發了一種新型外骨骼控制器,該控制器利用深度神經網路估計生物關節力矩,可以根據使用者的動作提供即時輔助,並已在多種活動中證明其有效性,顯著降低了使用者的能量消耗。
บทคัดย่อ
這篇研究論文介紹了一種新型外骨骼控制器,旨在解決現有控制器無法適應人類多樣化行為的局限性。
研究目標:
- 開發一種任務不可知型外骨骼控制器,可以根據使用者的動作提供即時輔助,無需針對特定任務進行手動調整。
方法:
- 利用深度神經網路,基於穿戴式感測器數據,即時估計使用者下肢的生物關節力矩(髖關節和膝關節)。
- 開發一種控制算法,根據估計的關節力矩提供輔助力,使外骨骼能夠與使用者的動作同步協調。
- 在28種不同的活動中測試控制器的性能,包括循環運動(如行走、跑步)和非結構化任務(如隨意漫步、高速橫向切割)。
主要發現:
- 深度神經網路能夠準確估計髖關節和膝關節力矩,平均 R² 值為 0.83。
- 相比於基於任務分類的最佳案例方法,新控制器表現更出色。
- 在十種活動(包括水平行走、跑步、舉起約 11 公斤的重物和弓步)中,新控制器顯著降低了使用者的能量消耗(代謝成本或下肢生物關節功),降幅從 5.3% 到 19.7% 不等,且無需在不同活動之間手動調整控制器。
主要結論:
- 這種任務不可知型控制器可以使外骨骼在各種人類活動中為使用者提供幫助,滿足了實際應用需求。
- 未來研究方向包括:將控制器應用於更廣泛的活動、優化控制算法以進一步降低能量消耗、開發更舒適和易於使用的外骨骼系統。
研究意義:
- 這項研究為開發更實用和有效的外骨骼系統做出了重要貢獻,有助於改善行動不便人士的生活質量。
局限性與未來研究方向:
- 研究僅限於下肢外骨骼,未來可拓展至上肢或全身外骨骼。
- 控制器的訓練數據集有限,未來需要更多樣化的數據以提高其泛化能力。
ปรับแต่งบทสรุป
เขียนใหม่ด้วย AI
สร้างการอ้างอิง
แปลแหล่งที่มา
เป็นภาษาอื่น
สร้าง MindMap
จากเนื้อหาต้นฉบับ
ไปยังแหล่งที่มา
www.nature.com
Task-agnostic exoskeleton control via biological joint moment estimation - Nature
สถิติ
平均 R² 值為 0.83
能量消耗降低 5.3% 到 19.7%
測試了 28 種不同的活動
舉起約 11 公斤的重物
คำพูด
"current state-of-the-art controllers cannot accommodate the rich set of possible human behaviours that range from cyclic and predictable to transitory and unstructured."
"our approach provided multi-joint, coordinated assistance through our autonomous, clothing-integrated exoskeleton."
"our controller significantly reduced user energetics (metabolic cost or lower-limb biological joint work depending on the task) relative to the zero torque condition, ranging from 5.3 to 19.7%, without any manual controller modifications among activities."
"this task-agnostic controller can enable exoskeletons to aid users across a broad spectrum of human activities, a necessity for real-world viability."
ข้อมูลเชิงลึกที่สำคัญจาก
by Dean D. Moli... ที่ www.nature.com 11-13-2024
https://www.nature.com/articles/s41586-024-08157-7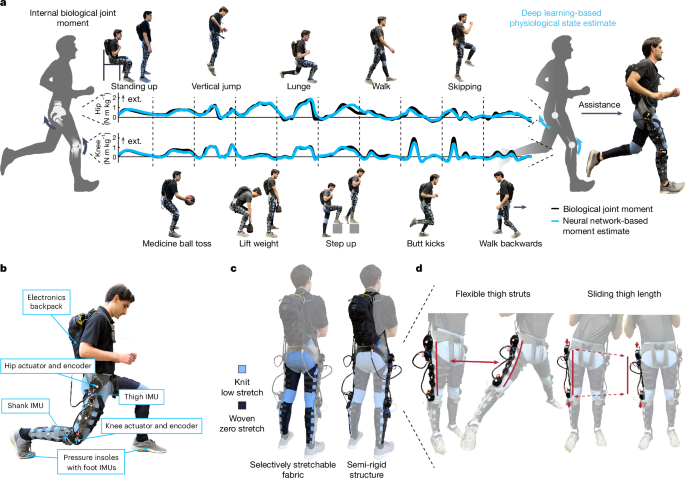
สอบถามเพิ่มเติม
這項技術如何應用於醫療領域,例如幫助中風患者進行康復訓練?
這項基於生物關節力矩估計的外骨骼控制技術,在醫療領域有著巨大的應用潛力,特別是對於中風患者的康復訓練。
個性化康復方案: 深度神經網路可以根據患者的個別差異,例如肌肉力量、關節活動度和步態特徵,實時調整外骨骼的輔助力度和模式。這將有助於制定個性化的康復方案,提高訓練效率。
提高訓練強度和時間: 外骨骼可以為患者提供額外的力量和支撐,讓他們能夠進行更高強度和更長時間的訓練,進而促進神經肌肉的恢復。
多樣化的訓練任務: 由於控制器不受限於特定任務,因此可以用於多種康復訓練活動,例如步行、站立、上下樓梯等,幫助患者恢復日常生活能力。
客觀評估康復進展: 系統可以記錄患者的關節力矩、運動學數據等,為醫生提供客觀的評估指標,以便調整治療方案。
總之,這項技術可以為中風患者提供更安全、有效和個性化的康復訓練,幫助他們重獲行動能力和獨立生活。
如果深度神經網路的估計出現錯誤,可能會導致外骨骼動作不穩定,如何確保系統的安全性?
深度神經網路的估計誤差確實可能影響外骨骼的安全性,因此需要採取多種措施來確保系統的安全性和可靠性:
多傳感器融合: 除了深度神經網路,還可以整合其他傳感器,例如肌電圖(EMG)、力傳感器和慣性測量單元(IMU),提供多源數據,提高系統對人體運動意圖的感知能力。
安全閾值設定: 在外骨骼的控制系統中設定安全閾值,例如關節角度、速度和力矩的限制,一旦超過閾值,系統將立即停止運行或切換到安全模式。
錯誤檢測和處理機制: 開發實時的錯誤檢測和處理機制,例如使用異常值檢測算法識別深度神經網路的異常輸出,並採取相應的措施,例如切換到備用控制器或停止外骨骼的運行。
嚴格的測試和驗證: 在將外骨骼應用於臨床之前,必須進行嚴格的實驗室測試和臨床試驗,以驗證其安全性和有效性。
通過結合以上措施,可以最大程度地降低深度神經網路估計誤差帶來的風險,確保外骨骼系統的安全可靠運行。
人類與機器融合的未來會是什麼樣子?
人類與機器融合的未來充滿了可能性,外骨骼技術正是其中一個重要的發展方向。
增強人類能力: 未來,外骨骼將變得更加輕便、智能和舒適,成為人類的「外骨骼衣」,幫助我們克服生理限制,增強力量、耐力和靈活性。
拓展人類活動領域: 外骨骼可以幫助人類適應極端環境,例如深海、太空和灾區,拓展人類的活動領域。
促進人機協作: 外骨骼可以作為人機交互的橋樑,讓我們更直觀地控制機器,實現人機協同工作。
改變醫療健康模式: 外骨骼將在康復醫學、輔助治療和老年護理等領域發揮重要作用,改善人們的生活質量。
然而,人類與機器融合也帶來了一些倫理和社會問題,例如數據隱私、技術公平性和人類身份認同等。我們需要在技術發展的同時,積極思考和應對這些挑戰,確保人類與機器融合的未來是美好而可持續的。
0
เกี่ยวกับ
ผลิตภัณฑ์
แหล่งข้อมูล
© 2024 by Linnk AI