
Entrar
Conceitos Básicos
シミュレーションを活用した学習によって、実験なしで汎用的な外骨格制御を実現できる。
Resumo
本研究では、外骨格の開発と普及を阻害している人間実験の必要性を解決するため、シミュレーションを活用した学習アプローチを提案している。
具体的には、筋骨格系とexoskeletonのダイナミクスモデルを活用し、強化学習によって制御ポリシーを学習する。
この学習したコントローラを実際の外骨格デバイスに適用したところ、歩行、走行、階段昇降の際に代謝率を大幅に低減できることが示された。
提案手法は、様々な支援ロボットの迅速な開発と普及に貢献できる一般化可能な戦略となる可能性がある。
Customize Summary
Rewrite with AI
Generate Citations
Translate Source
To Another Language
Generate MindMap
from source content
Visit Source
www.nature.com
Experiment-free exoskeleton assistance via learning in simulation - Nature
Estatísticas
歩行時の代謝率が24.3%低減
走行時の代謝率が13.1%低減
階段昇降時の代謝率が15.4%低減
Citações
"シミュレーションを活用した学習アプローチにより、実験なしで汎用的な外骨格制御を実現できる"
"提案手法は、様々な支援ロボットの迅速な開発と普及に貢献できる一般化可能な戦略となる可能性がある"
Principais Insights Extraídos De
by Shuzhen Luo,... às www.nature.com 06-12-2024
https://www.nature.com/articles/s41586-024-07382-4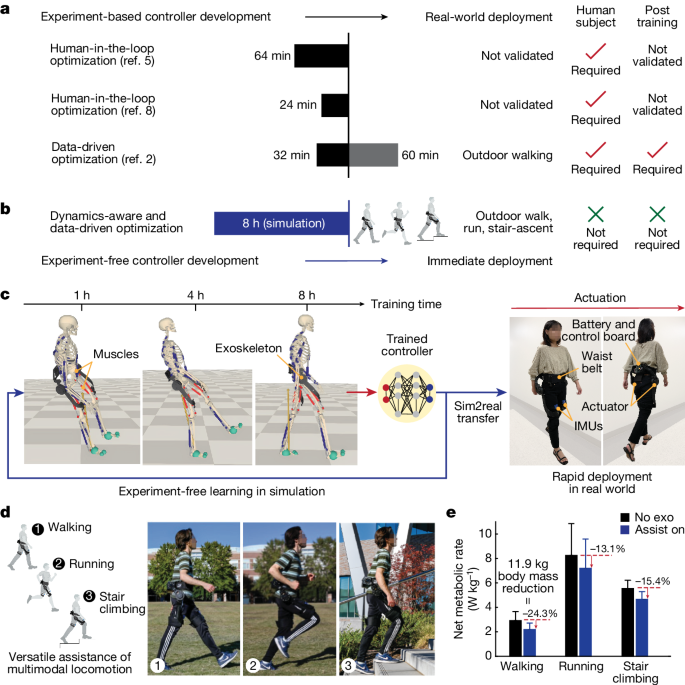
Perguntas Mais Profundas
シミュレーションモデルの精度向上によってさらなる性能向上は期待できるか?
シミュレーションモデルの精度向上は、さらなる性能向上に期待が持てると言えます。本研究で示されたように、ダイナミクスに精通した筋骨格モデルと外骨格モデルを活用した学習により、シミュレーションと現実のギャップを埋めることが可能となりました。このような高精度なシミュレーションモデルを用いることで、より現実に即したコントロールポリシーを効果的に学習し、実際の装置の性能向上につながるでしょう。
提案手法を他の支援デバイスに適用する際の課題は何か?
提案手法を他の支援デバイスに適用する際にはいくつかの課題が考えられます。まず、異なる支援デバイスに適用する際には、そのデバイスの特性や動作に合わせて適切なモデルを構築する必要があります。さらに、学習に使用するデータの収集や処理において、各デバイスごとの適切なパラメータ設定や最適化が必要となるでしょう。また、実際の環境での安全性や信頼性の確保も重要な課題となります。これらの課題を克服するためには、慎重な計画と実験が必要となるでしょう。
本研究で得られた知見は、人間の運動学習メカニズムの理解にどのように役立つか?
本研究で得られた知見は、人間の運動学習メカニズムの理解に大きく貢献する可能性があります。学習によって得られたコントロールポリシーは、人間の運動パターンや生理学的な特性を考慮して最適化されています。そのため、このコントロールポリシーを解析することで、人間の運動学習メカニズムや筋肉の協調に関する新たな知見を得ることができるでしょう。さらに、この研究から得られた知見は、将来のリハビリテーションや運動補助技術の開発にも活かすことができるかもしれません。
0
Produtos | Recursos
© 2024 by Linnk AI