
Sign In
Core Concepts
개방형 응용 프로그램에서 동적이고 다양하며 예측할 수 없는 장면을 처리하기 위해 인간 시각 시스템에서 영감을 얻은 보완적 감지 패러다임을 구현한 비전 칩 Tianmouc를 소개합니다.
Abstract
이 논문은 개방형 세계 응용 프로그램에서 발생하는 동적이고 다양하며 예측할 수 없는 장면에 대한 이미지 센서의 과제를 다룹니다. 전력과 대역폭의 제한으로 인해 이미지 센서의 고속, 고해상도, 넓은 동적 범위, 고정밀도 개발이 어려운 상황에서, 저자들은 인간 시각 시스템에서 영감을 얻어 원시 기반 표현을 구문 분석하고 이를 정확한 인지를 위한 인지 지향 경로와 신속한 대응을 위한 행동 지향 경로의 두 가지 보완적 비전 경로로 조립하는 새로운 감지 패러다임을 제안합니다.
이를 실현하기 위해 저자들은 하이브리드 픽셀 어레이와 병렬 및 이질적 판독 아키텍처를 포함하는 Tianmouc라는 비전 칩을 개발했습니다. Tianmouc는 10,000fps의 고속 감지, 130dB의 넓은 동적 범위, 공간 해상도, 속도 및 동적 범위에 대한 우수한 성능 지표를 달성했으며, 대역폭을 90% 적응적으로 줄일 수 있습니다. 또한 자율 주행 시스템에 Tianmouc 칩을 통합하여 까다로운 상황에서도 정확하고 빠르며 강력한 인지 능력을 보여줍니다.
저자들은 이 원시 기반 보완적 감지 패러다임이 다양한 개방형 세계 응용 프로그램을 위한 비전 시스템 개발의 근본적인 한계를 극복하는 데 도움이 될 것이라고 주장합니다.
A vision chip with complementary pathways for open-world sensing - Nature
Stats
최대 10,000fps의 고속 감지 가능
130dB의 넓은 동적 범위 달성
공간 해상도, 속도 및 동적 범위에 대한 우수한 성능 지표
대역폭을 90% 적응적으로 줄일 수 있음
Quotes
"개방형 응용 프로그램에서 동적이고 다양하며 예측할 수 없는 장면을 처리하기 위해 인간 시각 시스템에서 영감을 얻은 보완적 감지 패러다임을 구현했습니다."
"Tianmouc는 10,000fps의 고속 감지, 130dB의 넓은 동적 범위, 공간 해상도, 속도 및 동적 범위에 대한 우수한 성능 지표를 달성했으며, 대역폭을 90% 적응적으로 줄일 수 있습니다."
Key Insights Distilled From
by Zheyu Yang,T... at www.nature.com 05-29-2024
https://www.nature.com/articles/s41586-024-07358-4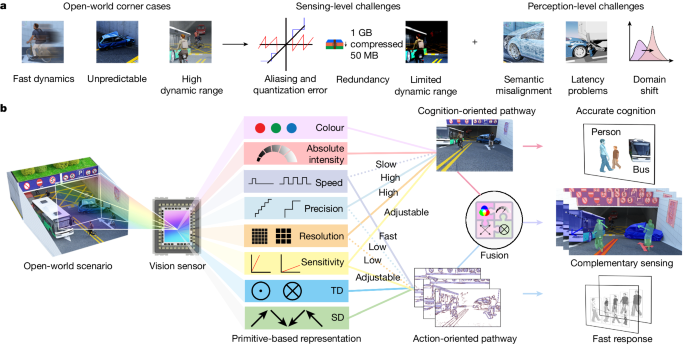
Deeper Inquiries
개방형 세계 응용 프로그램에서 보완적 비전 경로를 구현하는 다른 방법은 무엇이 있을까요
다른 방법으로는, 개방형 세계 응용 프로그램에서 보완적 비전 경로를 구현하기 위해 딥러닝 및 인공 신경망 기술을 활용할 수 있습니다. 이를 통해 이미지 센서가 동적이고 다양하며 예측할 수 없는 상황에서도 더욱 효과적으로 작동할 수 있습니다. 딥러닝은 이미지 인식 및 분류에 뛰어난 성능을 보이며, 인간의 시각 시스템에서 영감을 받은 보완적 비전 경로와 유사한 방식으로 작동할 수 있습니다.
보완적 비전 경로 접근법의 단점은 무엇이며, 이를 극복하기 위한 방법은 무엇일까요
보완적 비전 경로 접근법의 단점 중 하나는 복잡성과 계산 비용이 높다는 것입니다. 이를 극복하기 위해 하드웨어 및 소프트웨어 측면에서 효율적인 최적화가 필요합니다. 또한, 보완적 비전 경로의 성능을 향상시키기 위해 신경망 아키텍처나 알고리즘의 개선이 필요합니다. 더 나아가, 데이터 처리 및 저장을 위한 효율적인 메커니즘을 도입하여 보완적 비전 경로의 단점을 극복할 수 있습니다.
보완적 비전 경로 개념을 다른 센서 기술에 적용할 수 있을까요
보완적 비전 경로 개념은 다른 센서 기술에도 적용될 수 있습니다. 예를 들어, 레이다나 LiDAR와 같은 거리 측정 센서에서도 보완적 비전 경로의 원리를 적용하여 센서의 성능을 향상시킬 수 있습니다. 이를 위해 센서가 수집한 데이터를 다양한 primitive로 분해하고 이를 조합하여 보다 정확하고 신속한 정보를 제공할 수 있습니다. 이러한 방식으로, 다양한 센서 기술에서도 보완적 비전 경로의 개념을 적용하여 성능을 향상시킬 수 있습니다.
0
Visualize This Page
Generate with Undetectable AI
Translate to Another Language
Scholar Search
Products | Resources
© 2024 by Linnk AI