
본 내용은 Nature 저널에 게재된 Molinaro et al.의 연구 논문을 요약한 것입니다.
연구 목표: 기존 로봇 외골격의 제한적인 동작 범위를 극복하고, 순환 및 비순환 동작 모두를 지원하며 실시간으로 사용자의 움직임에 적응하는 작업 지향적인 로봇 외골격 제어 프레임워크를 개발하는 것을 목표로 합니다.
연구 방법: 연구진은 작업 지향적인 제어 프레임워크를 개발하고, 이를 로봇 외골격에 적용했습니다. 이 프레임워크는 다양한 센서 데이터를 사용하여 사용자의 움직임을 실시간으로 분석하고, 그에 따라 외골격의 움직임을 조정합니다. 연구진은 개발된 외골격을 사용하여 다양한 동작 (걷기, 달리기, 앉았다 일어서기, 스쿼트 등)을 수행하는 실험을 진행했습니다.
주요 결과: 개발된 로봇 외골격은 순환 및 비순환 동작 모두를 효과적으로 지원하는 것으로 나타났습니다. 또한, 실시간으로 사용자의 움직임 변화에 적응하여 자연스럽고 안정적인 보행을 제공했습니다. 특히, 기존 외골격과 달리 사용자가 의도하는 동작을 예측하고 지원함으로써 사용자의 피로도를 줄이고 운동 효율을 향상시켰습니다.
주요 결론: 본 연구에서 개발된 작업 지향적인 제어 프레임워크는 로봇 외골격 기술의 발전에 크게 기여할 것으로 기대됩니다. 특히, 다양한 동작을 지원하고 실시간 적응이 가능한 외골격은 재활, 산업 현장, 일상생활 등 다양한 분야에서 사람들의 움직임을 보조하고 향상시키는 데 활용될 수 있습니다.
의의: 본 연구는 로봇 외골격 기술의 주요 과제 중 하나였던 제한적인 동작 범위와 실시간 적응성 문제를 해결하는 데 중요한 돌파구를 제시했습니다. 이는 향후 더욱 자연스럽고 효과적인 움직임 지원 로봇 개발에 기여할 것으로 예상됩니다.
제한점 및 향후 연구 방향: 본 연구는 제한된 수의 실험 참가자를 대상으로 진행되었으며, 다양한 환경 조건에서의 성능 평가는 이루어지지 않았습니다. 향후 연구에서는 더욱 다양한 실험 환경과 참가자를 대상으로 외골격의 성능을 검증하고, 장시간 사용에 대한 안전성 및 효과를 평가해야 합니다. 또한, 사용자의 의도를 보다 정확하게 파악하고 예측하기 위한 인공지능 기술의 적용 가능성을 모색해야 합니다.
要約をカスタマイズ
AI でリライト
引用を生成
原文を翻訳
他の言語に翻訳
マインドマップを作成
原文コンテンツから
原文を表示
www.nature.com
Robotic exoskeleton adapts to changes in leg movements in real time
抽出されたキーインサイト
by Myunghee Kim 場所 www.nature.com 11-13-2024
https://www.nature.com/articles/d41586-024-03546-4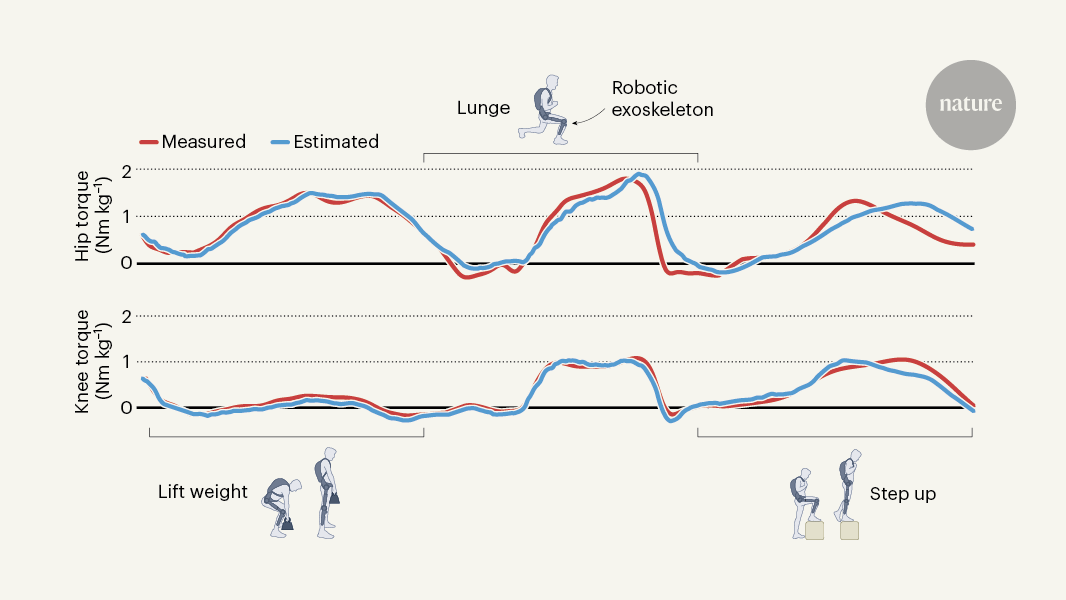
深掘り質問
이 로봇 외골격 기술이 실제로 상용화되기 위해 극복해야 할 기술적, 사회적 과제는 무엇일까요?
사용자의 움직임에 전적으로 의존하는 외골격은 사용자의 의존성을 높여 근육 기능 저하를 초래할 수도 있지 않을까요?
인간의 움직임을 보조하는 기술의 발전은 궁극적으로 인간의 신체 능력에 대한 정의를 어떻게 변화시킬까요?
© 2024 by Linnk AI