
サインイン
Simulation-Based Approach Enables Versatile and Adaptable Robotic Exoskeletons for Diverse Users and Tasks
核心概念
A simulation-based framework can develop versatile and adaptable robotic exoskeletons that can effectively assist users with a range of tasks and be tailored to different individuals.
要約
The content discusses a new framework for designing robotic exoskeletons that can adapt to the diverse needs and movements of individual users. Traditionally, robotic exoskeletons are often designed for specific activities like walking or running, and require extensive tuning for each wearer.
The authors introduce a simulation-based approach that can model human-device interactions without the need for extensive data from users wearing the device. This simulation-driven design allows the exoskeletons to provide effective assistance for a variety of tasks and be customized to different individuals.
The key highlights of this approach include:
- It relies on simulating human-device interactions rather than requiring large datasets from users wearing the device.
- The simulation-based framework enables the development of more versatile and adaptable robotic exoskeletons.
- These exoskeletons can effectively assist users with a range of tasks, not just specific activities like walking or running.
- The simulation-driven design allows the exoskeletons to be tailored and adapted to different individuals, paving the way for the integration of robotic exoskeletons into everyday life.
要約をカスタマイズ
AI でリライト
引用を生成
原文を翻訳
他の言語に翻訳
マインドマップを作成
原文コンテンツから
原文を表示
www.nature.com
Robotic exoskeleton adapts to its wearer through simulated training
統計
Robotic exoskeletons are often designed to assist with only one activity, such as walking or running.
Extensive tuning is required for each wearer of traditional robotic exoskeletons.
引用
"The authors show that this simulation-based approach leads to effective assistance for a range of tasks and can be adapted to different individuals — paving the way towards the integration of robotic exoskeletons into everyday life."
抽出されたキーインサイト
by Alexandra S.... 場所 www.nature.com 06-12-2024
https://www.nature.com/articles/d41586-024-01506-6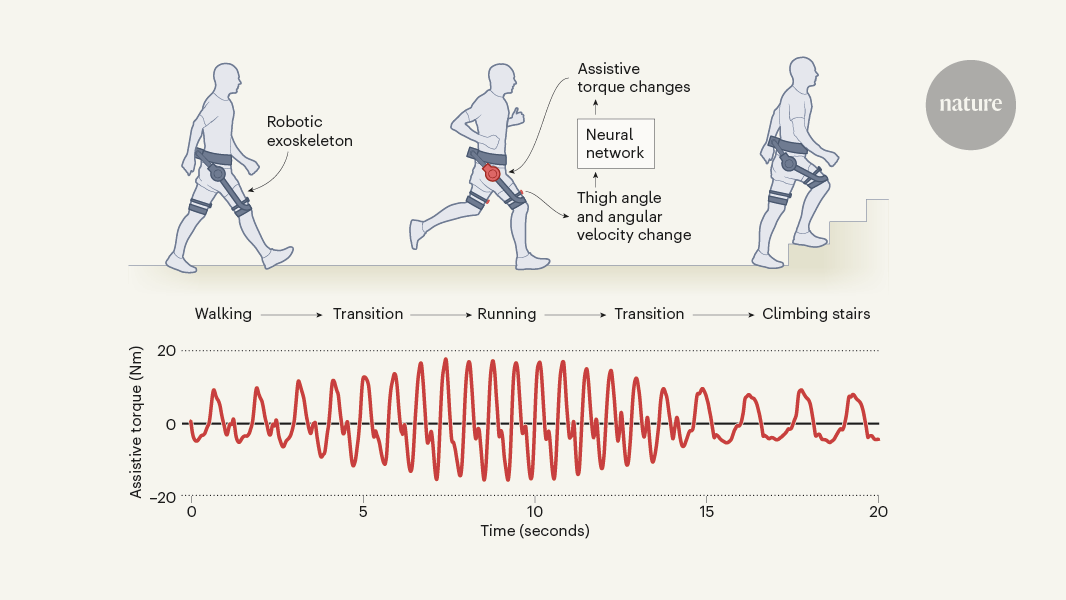
深掘り質問
How can the simulation-based framework be further improved to better capture the nuances and complexities of human movement and interaction with robotic exoskeletons?
To enhance the simulation-based framework for capturing the intricacies of human movement and interaction with robotic exoskeletons, several improvements can be implemented. Firstly, incorporating advanced machine learning algorithms can help in refining the simulation models by analyzing vast amounts of movement data to better understand the variations in human motion. Additionally, integrating real-time feedback mechanisms can enable the exoskeleton to adapt instantaneously to the wearer's movements, providing a more seamless and natural experience. Furthermore, leveraging virtual reality technology can create immersive simulations that closely mimic real-world scenarios, allowing for more accurate predictions of how individuals will interact with the exoskeleton in different environments.
What are the potential limitations or challenges in scaling this simulation-driven approach to real-world deployment of robotic exoskeletons?
While the simulation-driven approach offers promising benefits, there are several challenges to consider when scaling it for real-world deployment of robotic exoskeletons. One limitation is the need for extensive computational resources to run complex simulations, which may pose challenges in terms of processing power and energy consumption. Moreover, ensuring the accuracy and reliability of the simulation models in diverse real-world conditions can be a significant hurdle, as human movements are highly variable and influenced by numerous factors. Additionally, regulatory hurdles and safety concerns must be addressed when transitioning from simulated environments to actual use, requiring thorough testing and validation processes to guarantee the effectiveness and safety of the exoskeletons.
How might the integration of robotic exoskeletons into everyday life impact societal perceptions, accessibility, and ethical considerations around the use of such assistive technologies?
The integration of robotic exoskeletons into everyday life can have profound implications on societal perceptions, accessibility, and ethical considerations regarding assistive technologies. From a societal perspective, widespread adoption of exoskeletons can lead to a shift in attitudes towards individuals with motor disabilities, promoting inclusivity and empowerment. Increased accessibility to these technologies can enhance the quality of life for many individuals, enabling them to participate more fully in various activities and improving overall well-being. However, ethical considerations such as data privacy, consent, and equity in access to exoskeletons must be carefully addressed to prevent potential misuse or discrimination. Overall, the integration of robotic exoskeletons has the potential to revolutionize the way we perceive and interact with assistive technologies, offering new opportunities for individuals with motor disabilities to lead more independent and fulfilling lives.
0