
Sign In
Core Concepts
ロボット外骨格は、シミュレーション訓練を通じて、様々な活動に対応し、個人差にも適応できるようになる。
Abstract
この論文では、ロボット外骨格の新しい開発フレームワークが紹介されています。従来のロボット外骨格は、歩行や走行などの特定の活動に特化しており、個人差への対応が難しい問題がありました。
この新しいフレームワークでは、人間-デバイス間の相互作用をシミュレーションすることで、大量のデータを必要とせずに、様々な活動に対応できる適応性の高いデバイスを開発することができます。
著者らは、このシミュレーション訓練アプローチにより、幅広い課題に対して効果的な支援が可能となり、個人差にも適応できることを示しています。これにより、ロボット外骨格の日常生活への統合が期待されます。
Robotic exoskeleton adapts to its wearer through simulated training
Stats
ロボット外骨格は、従来、特定の活動に特化しており、個人差への対応が難しい問題があった。
シミュレーション訓練を通じて、様々な活動に対応し、個人差にも適応できるようになる。
Quotes
「ロボット外骨格は、シミュレーション訓練を通じて、様々な活動に対応し、個人差にも適応できるようになる」
「これにより、ロボット外骨格の日常生活への統合が期待される」
Key Insights Distilled From
by Alexandra S.... at www.nature.com 06-12-2024
https://www.nature.com/articles/d41586-024-01506-6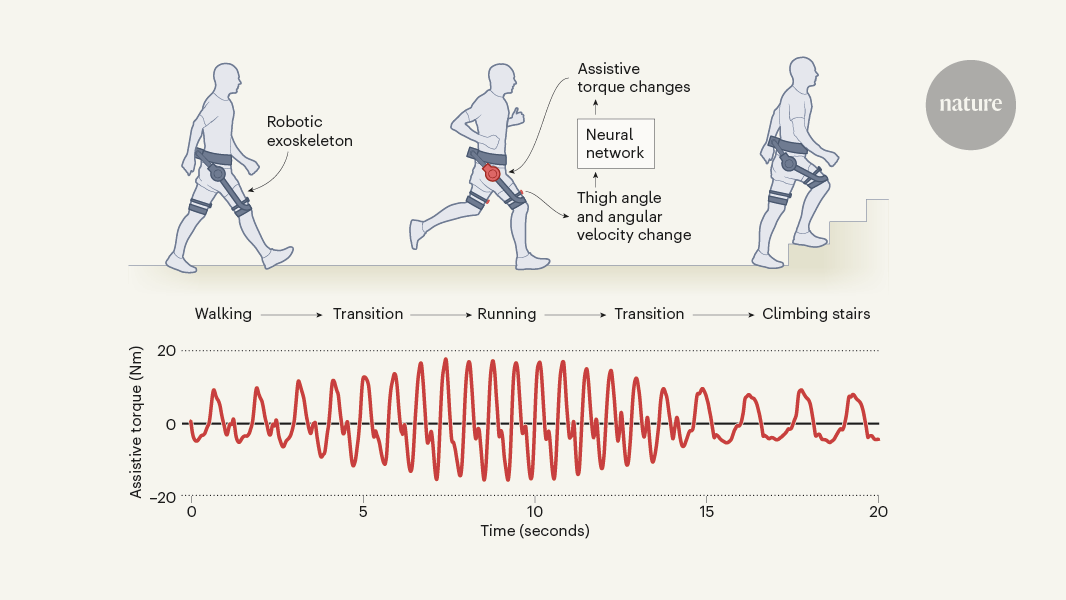
Deeper Inquiries
ロボット外骨格の適応性向上に向けて、どのようなセンサーやアクチュエーターの技術開発が重要か。
ロボット外骨格の適応性を向上させるためには、高度なセンサー技術とアクチュエーター技術の開発が不可欠です。センサー技術においては、身体の動きや筋肉の状態をリアルタイムで正確に検出することが重要です。例えば、圧力センサーや角度センサーを活用して、装着者の動作パターンや筋肉の状態を把握し、それに合わせて外骨格の補助を調整することが可能となります。また、アクチュエーター技術においては、柔軟性や精度が求められます。装着者の動きに合わせて自在に制御できるアクチュエーターを開発することで、外骨格の適応性を高めることができます。
シミュレーション訓練の精度を高めるためには、どのような人間行動モデルの開発が必要か。
シミュレーション訓練の精度を向上させるためには、複雑かつ多様な人間の動作を正確にモデル化することが必要です。人間行動モデルの開発においては、機械学習や深層学習などの最新技術を活用することが重要です。これにより、装着者の個々の動作特性や筋肉の状態を適切に予測し、外骨格の補助を最適化することが可能となります。さらに、リアルな人間の動作をシミュレーションすることで、装着者にとって自然な動きを実現し、訓練効果を最大化することができます。
ロボット外骨格の日常生活への統合を実現するためには、どのような倫理的課題に取り組む必要があるか。
ロボット外骨格を日常生活に統合する際には、倫理的な課題にも十分に取り組む必要があります。例えば、プライバシーやデータセキュリティの問題が挙げられます。外骨格が装着者の生体情報を収集し、分析する際には、その情報が適切に保護され、悪用されないようにする必要があります。また、外骨格の補助が人間の能力を超える場合、倫理的な問題が生じる可能性があります。そのため、外骨格の設計や使用においては、倫理委員会や専門家の助言を仰ぎながら、社会全体の利益を考慮した適切な方針を策定することが重要です。
0
Products | Resources
Read more
- 음성-언어-모델을-이용한-프롬프트-기반-음성-합성에-대한-실증적-연구
- 대규모-언어-모델에서-추출한-근거를-활용한-해석-가능한-혐오-발언-탐지
- systematische-untersuchung-von-sprachmodellen-für-sprachgesteuerte-sprachsynthese
- 확산-모델의-훈련-없는-유도-기법-작동-원리와-한계
- interpretierbare-erkennung-von-hassrede-durch-merkmale-aus-großen-sprachmodellen
- tieferes-verständnis-der-trainingsfreien-diffusionssteuerung-mechanismen-und-grenzen
- 실제-배드민턴-선수-행동을-경험적-맥락과-브라운-운동을-통해-오프라인-모방하기
- realistische-simulation-des-verhaltens-von-badmintonspielern-durch-erfahrungskontext-und-brownsche-bewegung
© 2024 by Linnk AI